simba-mars-roverMars by 2030
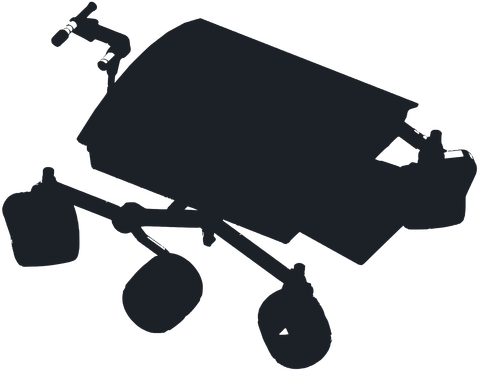
Led Poly1Rover's restoration of a Mars rover prototype's kinematic engine and AI vision engine into an autonomous, headless-startup system. Connected a Starlink Mini satellite.
LinuxCEmbeddedYOLOWeb
"Computer engineer who likes building things across the stack — from web apps to embedded systems."
Led Poly1Rover's restoration of a Mars rover prototype's kinematic engine and AI vision engine into an autonomous, headless-startup system. Connected a Starlink Mini satellite.
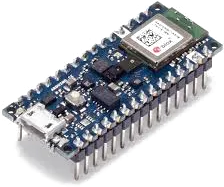
Built an interactive Rock-Paper-Scissors game with a custom CNN on an Arduino Nano 33 BLE Sense — quantized to INT8 and shrunk 71% to 100.42 KB for on-device inference.

Built and deployed a Django app that centralized vendor management and replaced manual Excel workflows — SSO, maintenance requests, IT ticketing.
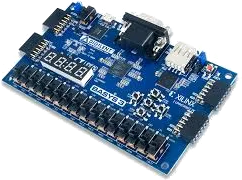
A 32-bit CPU on a Basys3 board with a 5-stage pipeline and L1 cache. Hazard detection, forwarding, and caching delivered a ~1.5× boost over non-pipelined design.
Selective-Reject ARQ over UDP with a sliding window and FSM-driven flow control. Custom circular buffer and a multi-process fork() server for concurrent transfers.

Architected a member-referral platform and led developers through an Agile approach. Shipped invite flows, referral tracking, and admin views.
Led a computer engineering team restoring the SIMBA Mars rover's kinematic engine and AI vision engine, incorporating headless boot sequencing and Starlink Mini satellite connectivity.
Board-level role balancing technical mentorship and org strategy — led the Developer Bootcamp and oversaw engineering initiatives across project teams.
Automated 20+ QE test cases in Java/Selenium and validated end-to-end functionality for Agentic AI features.
Led a team to architect and develop the Paso Robles Food Co-op referral platform.
Developed and deployed the Facilities Dashboard Application on SESLOC's network, centralizing vendor management.
Developed a volunteer management system for a nonprofit supporting undocumented students
Find me on LinkedIn — always happy to connect.
linkedin.com/in/ivanalvarez04 ↗